西门子变频器一级代理商西门子 S7-1200是一款紧凑型、模块化的PLC,扩展性能比较良好,可完成一些简单和的逻辑控制、自带以太网口,与HMI,PC等上位机通讯方便快捷 。此外,它具有支持小型运动控制系统、过程控制系统的应用功能。接下来为大家分享一下西门子1200运动控制程序。
更新时间:2025-06-17
厂商性质: 总代理商
在线留言
西门子变频器一级代理商 西门子变频器一级代理商
在启动或制动频繁的场合,不要用主电路电源的通断来控制变频器的
原装西门子触摸屏 西门子触摸屏#授权一级代理商OMRON *销售 3.4 固定频率的设置
在用外部开关实现电动机固定频率运转时,通常需要依据实际情况对p006,p051-055,p041-044等参数进行设置。在设置中比较易犯的一个错误是:只设置对应某个固定频率的端子。在这种设置下,即使其他设置*正确,电动机也不会运转。这是因为在mmv变频器的设计中,当p006和p007设置成外部开关量控制时,固定频率和运行两个功能是分离的。也就是说:需要设定两个端子(一个把某一固定频率赋值给电动机;另一个则负责运行),电动机方可按照设定的固定频率运转。
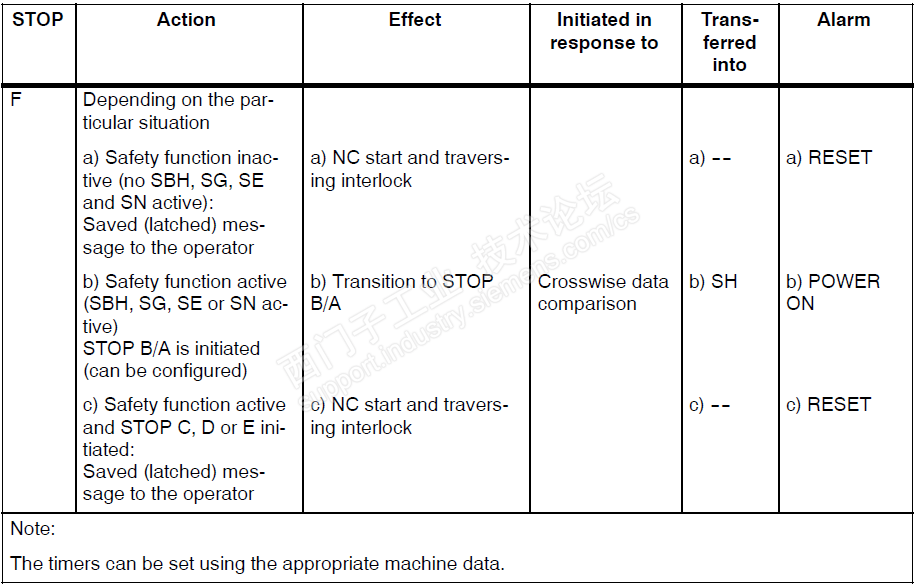
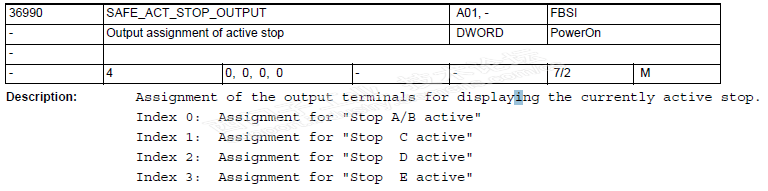
根据系统报警和外部条件的不同,安全集成功能提供了不同级别的安全停止信号,其响应*不同。

StopA是高等级的报警停止信号,当其触发后,电源脉宽调制解调立即终止,系统直流母线失去电源供给,机床所有轴立即进入自由停车或者靠机械刹车制动的状态。StopA触发后,机床进入安全停止SH状态,需要NCK reset后才能恢复。该信号触发如从其他内部信号跳转而来,则不可控,如是外部信号给定,也可通过SPL或者PLC程序控制。
StopB是仅次于StopA的停止信号,当其触发后,该轴预设速度值归零,系统以OFF3的Ramp进入减速通道,给出TB的时间(MD36956),使速度降至系统设定的关机速度以下(MD36960),但不管实际速度是否降至关机速度,TB时间一过,必定跳转到StopA。StopB触发后,机床进入安全停止SH状态,需要NCK reset后才能恢复。该信号为内部信号,不可控。
StopC是较StopB略低一级的停止信号,当其触发后,该轴预设速度值归零,系统以OFF3的Ramp进入减速通道,给出TC的时间(MD36952),如速度顺利降至零速,则系统进入安全操作停SBH状态,仅需要reset就可恢复;如未顺利降至零速,则跳转到StopB,进而触发StopA。该信号作为外部给定信号时可控。
StopD是更低一级的停止信号,当其触发后,该轴预设速度值归零,系统以路径Ramp进入减速通道,给出TD的时间(MD36953),如速度顺利降至零速,则系统进入安全操作停SBH状态,仅需要reset就可恢复;如未顺利降至零速,则跳转到StopB,进而触发StopA。该信号作为外部给定信号时可控。
StopE是特殊的停止信号,是专门为延时停止和急停回退功能ESR所设定的。当触发后,系统执行ESR功能,给出TE的时间(MD36954),如ESR执行完毕,则系统进入安全操作停SBH状态,仅需要reset就可恢复;如ESR未执行完毕,则跳转到StopB,进而触发StopA。该功能需要特别编辑,需要特别的软硬件支持。该信号作为外部给定信号时可控。
StopF是专属于驱动的停止信号,一般根据当前的情况好坏,给出不同的响应。情况轻微的进入SBH状态,如果在TF时间到了仍未取消(MD36955),则跳转StopB,进而触发StopA。该信号为内部信号,不可控。
下边看一下各个停止信号之间的优先级:
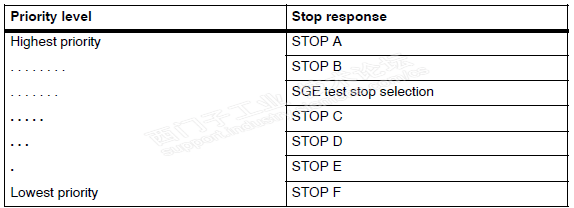
对外部停止信号而言,同样遵从以上原则,在有多个信号同时激活的时候,其真实响应是对应高优先级的那个。这也是为什么欧洲机床厂的ESR功能往往并不放在安全集成里,而是单独做成一个同步条件的原因,就是为了避免更高优先级的响应取代急停回退的动作。
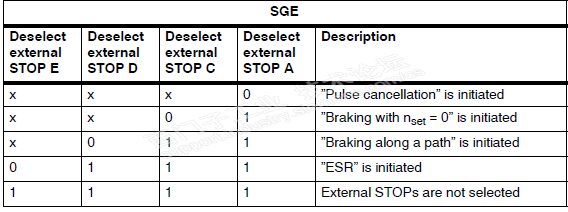
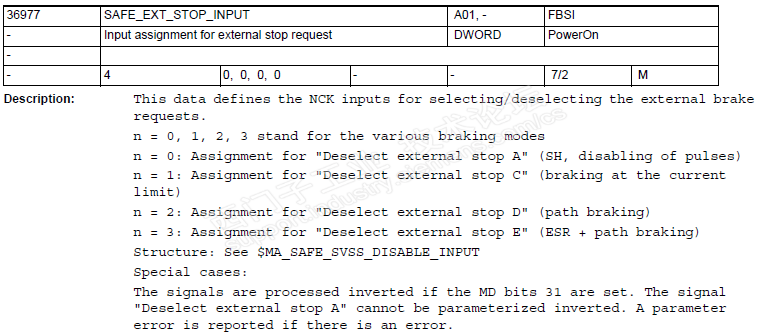
外部停止的SGE设定:
外部停止的SGA设定:
外部停止的PLC设定SGE地址,DB3x:
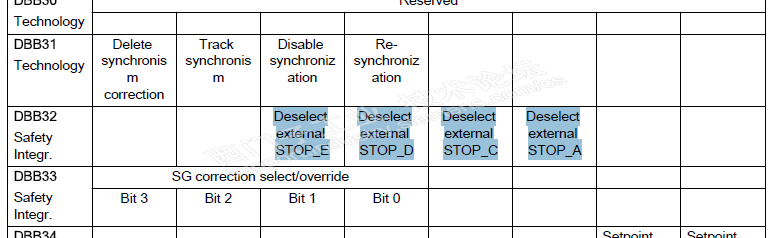
外部停止的PLC设定SGA地址,DB3x:

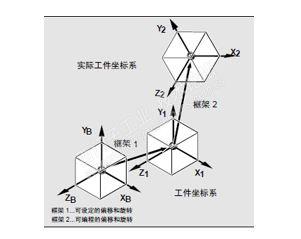
12、框架定义
1.框架定义一种运算规范,它把一种直角坐标系转换到另一种直角坐标系。
2.它是一种:工件坐标系的空间描述。
3.在一个框架中可以使用以下几个部分:
① 零点偏移
② 旋转
③ 镜像
④ 比例尺
如图西门子OP032S数控键盘

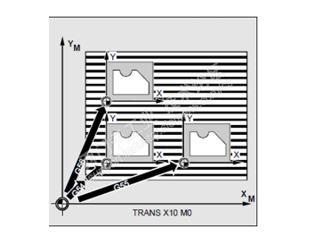
13、工件坐标系中机床轴的分配
工件坐标系的位置就基准坐标系而言(或者机床坐标系),通过可设定的框架确定。在NC 程序中,这种可设定的框架用相应的指令激活,比如G54。
如图1:
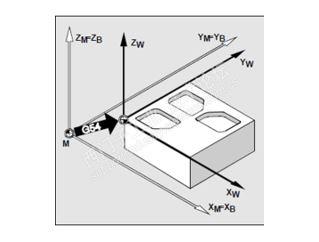
如图2
N10 G0 G90 X10 Y10 F500 T1 ;返回
N20 G54 S1000 M3 ;调用个零点偏移,主轴右旋
N30 L47 ;程序运行,在此作为子程序
N40 G55 G0 Z200 ;调用第二个零点偏移Z,在障碍物之后
N50 L47 ;程序作为子程序运行
N60 G56 ;调用第三个零点偏移
N70 L47 ;程序作为子程序运行
N80 G53 X200 Y300 M30 ;零点偏移抑制,程序结束
14、实际工件坐标系
有些情况下在一个程序当中,可能要求把原来所选择的工件零点移动到另一个位置,或者旋转/镜像/比例尺到另一个位置,它是非常必要的。使用可编程的框架,可以使当前的零点变更到工件坐标系中一个合适的位置(或者通过旋转、镜像及比例尺),由此得到一个当前工件坐标系。在一个程序之内,也可以进行几个零点偏移。
15、进给轴
一、在编程时可以有以下几种轴:
1、加工轴:轴名称可以通过机床数据调整。缺省设定中名称为:X1, Y1, Z1, A1, B1, C1, U1, V1此外还有固定的轴名,它们可以一直使用:AX1, AX2, …, AXn
2、通道轴:所有在一个通道中运行的轴。名称:X, Y, Z, A, B, C, U, V
3、主轴/几何轴:主轴确定一个直角、右旋坐标系。 在该坐标系中编程刀具运行。在数控技术中,主轴作为几何轴描述。对于车床,适用:几何轴X,Z,有时有Y。对于铣床,适用:几何轴X、Y 和Z。
4、辅助轴:与几何轴相反,在辅助轴中没有定义这些轴之间的几何关系。举例:刀塔位置U,尾架V
5、轨迹轴:轨迹轴描述了轨迹行程,从而给出其在空间的刀具运动。
6、同步轴:同步轴从起始点同步运行轨迹,直至编程终点。
7、定位轴:定位轴分开插补,也就是说每个定位轴有一个自身的轴插补器,有自己的进给率。
8、 指令轴:在同步工作中,由于一个事件(指令)会启动指令轴。它们可能会与零件程序*异步地定位、启动和停止。
9、PLC 轴:PLC 轴由PLC 通过主程序中特殊的功能块运行,可以与所有其它的轴异步运行。
10、链接轴:链接轴与另一个NCU 以物理形式相连接,并受其位置控制。
11、引导链接轴:引导链接轴是指该轴由一个NCU 插补,一个或者几个其它的NCU 作为引导轴使用,用于引导跟随轴。
12、其中几何轴、同步轴和定位轴可以编程。
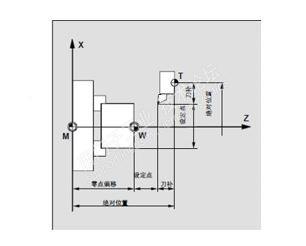
16、坐标系和工件加工
1、位移计算
2、位移计算得到一个程序段中运行的位移量,必须考虑所有的偏移和补偿。
通常情况下下列关系成立:
位移 = 给定值 - 实际值 + 零点偏移(NV)+ 刀具补偿(WK)
如图:
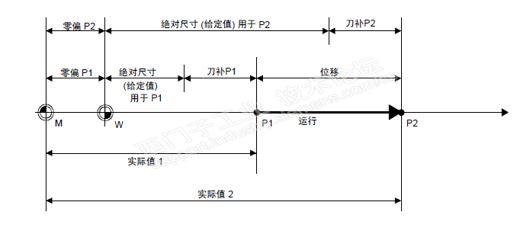
17、位移计算
一、如果在一个新的程序段中编程了一个新的零点偏移和一个新的刀具补偿,则:
① 在尺寸输入时:
位移= (尺寸P2-尺寸P1)+(NV P2 - NV P1) + (WK P2 - WK P1).
② 在相对尺寸输入时:
位移= 相对尺寸 + (NV P2 - NV P1) +(WK P2 - WK P1).
西门子 S7-1200是一款紧凑型、模块化的PLC,扩展性能比较良好,可完成一些简单和的逻辑控制、自带以太网口,与HMI,PC等上位机通讯方便快捷 。此外,它具有支持小型运动控制系统、过程控制系统的应用功能。接下来为大家分享一下西门子1200运动控制程序。
点击“指令”、“工艺”、“运动控制”,出现运动控制指令。
1. MC_Power:启用、禁用轴
“MC_Power”运动控制指令可启用或禁用轴。
要求:
① 定位轴工艺对象已正确组态;
② 没有待决的启用/禁止错误。
要启用轴,请按下列步骤操作:
① 首先检查是否满足上述要求;
② 使用所需值对输入参数“StopMode”进行初始化。将输入参数“Enable”设置为 TRUE。轴已启用。输出参数“Status”和工艺对象变量<轴名称> StatusBits.Enable的值为TRUE。
要禁用轴,可以按照下列步骤操作:
① 停止轴。可以通过工艺对象变量 <轴名称>.StatusBits.StandStill 识别轴何时处于停止状态;
② 在轴停止后,将输入参数“Enable”设置为 FALSE;
③ 如果输出参数“Busy”和“Status”以及工艺对象变量 <轴名称>.StatusBits.Enable的值均为 FALSE,则说明禁用轴已完成。
2. MC_Reset:确认故障
运动控制指令“MC_Reset”可用于确认“伴随轴停止出现的运行错误”和“组态错误”。
要求:
① 定位轴工艺对象已正确组态;
② 已经清除了引起这些需确认的待决组态错误的原因(例如,已将定位轴工艺对象中的加速度更改为有效值)。
